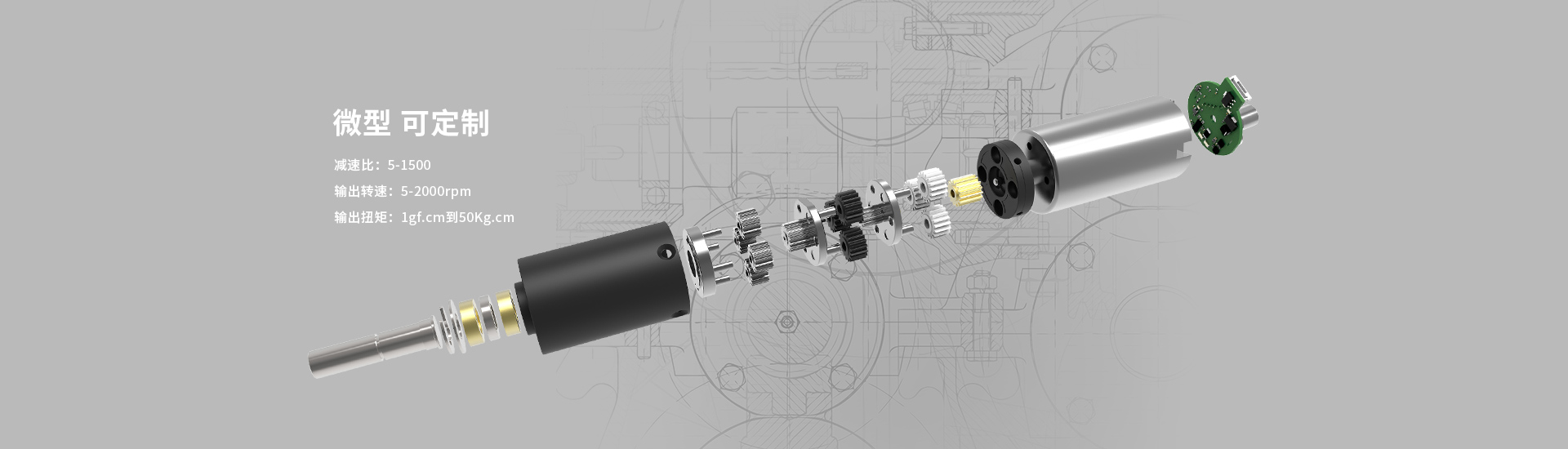
快貓下載(zai)地(di)址: 機器人手爪(zhua)電(dian)機產品技術參(can)數與定制開發(fa)服務
機(ji)(ji)(ji)(ji)械(xie)手(shou)(shou)�������是指能(neng)模(mo)仿人(ren)手(shou)(shou)和臂�������的(de)(de)某些動(dong)(dong)(dong)(dong)作功能(neng)�������,用(yong)以按固(gu)定程序抓取�������、搬運物件或操(cao)作工具�������的(de)(de)自(zi)動(dong)(dong)(dong)(dong)操(cao)作裝置�������。機(ji)(ji)(ji)(ji)械(xie)手(shou)(shou)�������是早(zao)出(chu)現(xian)�������的(de)(de)工業機(ji)(ji)(ji)(ji)器(qi)(qi)人(ren)�������,也�������是早(zao)出(chu)現(xian)�������的(de)(de)現(xian)代(dai)機(ji)(ji)(ji)(ji)器(qi)(qi)人(ren)�������,它可代(dai)替(ti)人(ren)�������的(de)(de)繁重勞動(dong)(dong)(dong)(dong)以實(shi)現(xian)生(sheng)產�������的(de)(de)機(ji)(ji)(ji)(ji)械(xie)化(hua)和自(zi)動(dong)(dong)(dong)(dong)化(hua)�������,能(neng)在有害環境下操(cao)作以保護人(ren)身安(an)全�������。機(ji)(ji)(ji)(ji)械(xie)手(shou)(shou)爪主(zhu)要分(fen)為兩部分(fen)�������,即手(shou)(shou)臂和末端執行(xing)器(qi)(qi)�������。手(shou)(shou)臂利(li)用(yong)關節�������的(de)(de)運動(dong)(dong)(dong)(dong)帶動(dong)(dong)(dong)(dong)末端執行(xing)器(qi)(qi)�������的(de)(de)動(dong)(dong)(dong)(dong)作�������,達到預定�������的(de)(de)位(wei)置進行(xing)預定�������的(de)(de)操(cao)作�������。機(ji)(ji)(ji)(ji)器(qi)(qi)人(ren)手(shou)(shou)抓電機(ji)(ji)(ji)(ji)�������是一種(zhong)小(xiao)功率微型傳動(dong)(dong)(dong)(dong)減速(su)(su)電機(ji)(ji)(ji)(ji)齒輪箱(xiang)�������,主(zhu)要傳動(dong)(dong)(dong)(dong)結構由驅動(dong)(dong)(dong)(dong)電機(ji)(ji)(ji)(ji)(微型電機(ji)(ji)(ji)(ji))�������、齒輪箱(xiang)(減速(su)(su)器(qi)(qi))組裝而成�������的(de)(de)減速(su)(su)傳動(dong)(dong)(dong)(dong)設(she)備�������,運用(yong)在機(ji)(ji)(ji)(ji)器(qi)(qi)人(ren)手(shou)(shou)臂�������、機(ji)(ji)(ji)(ji)械(xie)手(shou)(shou)傳動(dong)(dong)(dong)(dong)齒輪箱(xiang)電機(ji)(ji)(ji)(ji)模(mo)塊上�������,簡......
[
05-08 15:31
]


")
